

 Expand Image
Expand Image

This past spring saw some really important innovations in the MUSA program at Penn. Let's take a look at three of these acheivements.
The first annual MUSA Practicum
Led by MUSA Program Director, Professor Ken Steif, the MUSA Practicum is a capstone class where students work directly with government clients to develop novel public-sector machine learning algorithms.
All of the case studies and source code are posted on on Githb here. The hope is that any jurisdiction can pick up the source code and replicate these algorithms in their own communities. According to Govtech Magazine, this may already by happening. Here is a brief rundown of the 5 projects the students completed.
1. Developing a foreclosure warning system in Philadephia
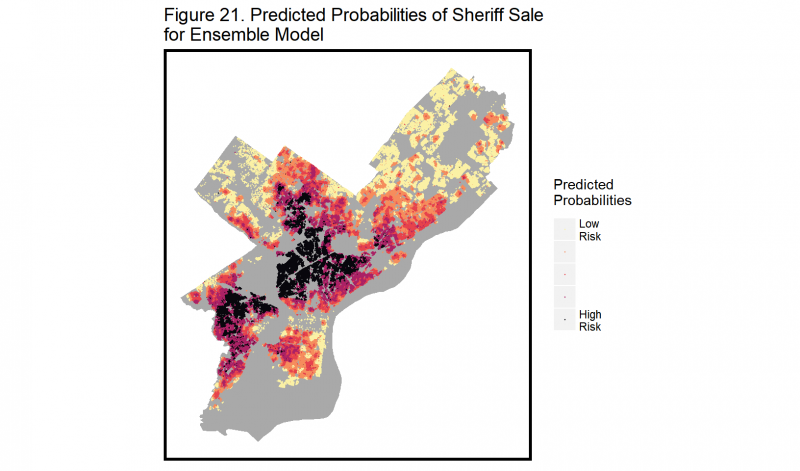
Students worked with Philadelphia Legal Assitance to develop an algorithm that can more efficiently allocate community legal aid to households at risk of losing their home to sheriff sale. By integrating years of court and tax delinquency data along with ancillary open data sources, the students built a robust model predicting sheriff sales risk.
2. Quantifying bike share subsidy in low income Philadelphia neighborhoods
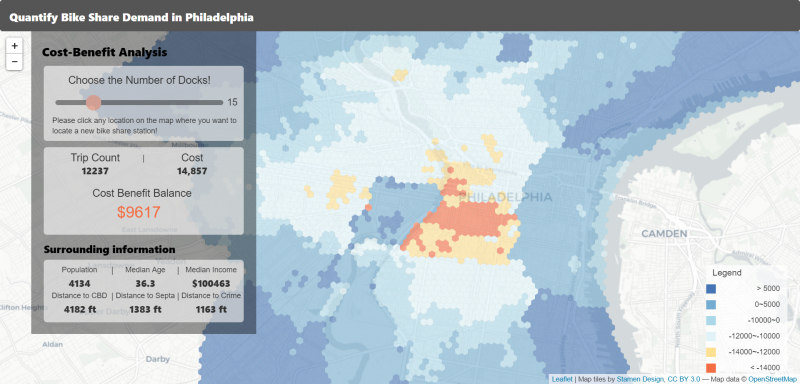
This team trained a machine learning model on hundreds of thousands of bike share trips in cities across the country in order to predict bike share demand for every area of Philadelphia. The goal was to create a simple cost benefit tool Philadelphia could use when siting new bike share stations in low-income communities.
3. Predicting vehicle crashes with built environment data, Louisville, KY
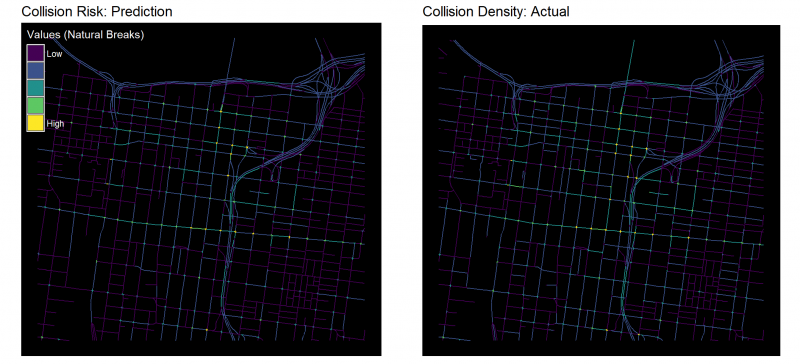
Working with the City of Louisville, students in this group combined data on vehicle crashes with data from Waze and features of the built environment to create a model that predicts crash risk for every street Citywide. The goal is for the City to use these analytics to prioritize future street safety interventions.Read more.
4. Predicting household lead risk in Minneapolis, Mn.
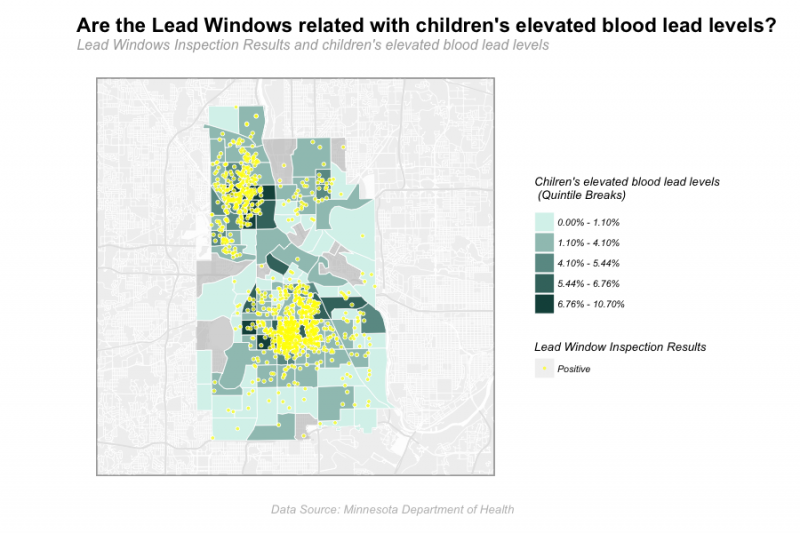
This team worked with the City of Minneapolis to gather a host of parcel and building level indicators to help predict lead presence. The goal was to develop a tool that inspectors can use to prioritize houses to be inspected for lead.
5. Siting opioid clinics by predicting opioid overdose events - Providence RI
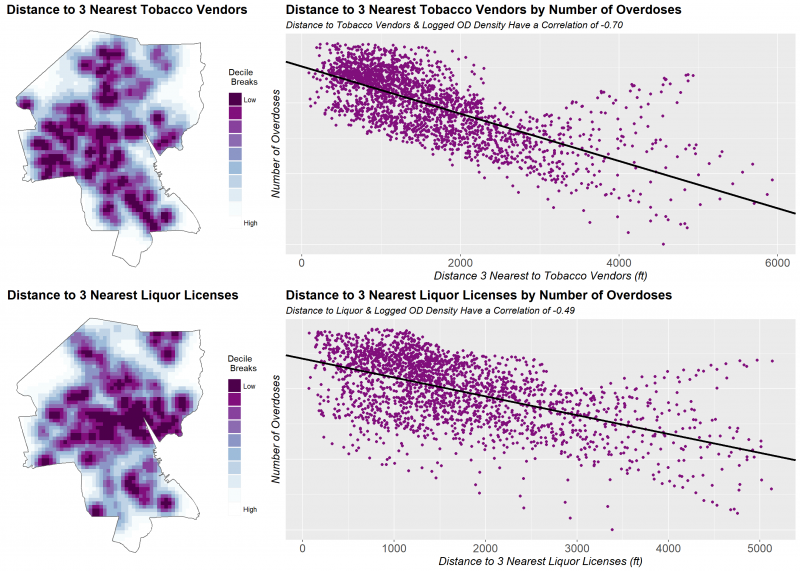
Providence has embarked on an ambitious program to offer addiction treatment resources in public buildings like fire stations. This practicum team built a spatial risk model to predict overdose events as a way to better allocate these treatment resources. Read more. Check out the app.
MUSA Workshop with Rob Emanuele

We were super excited to have Azavea's Vice President of Research, Rob Emanuele come to give the students a workshop on spatial analysis in Python. Rob posted the tutorial on Github for others to enjoy. Stay tuned for other exciting workshops!
Using deep learning and StreetView imagery to locate trash cans
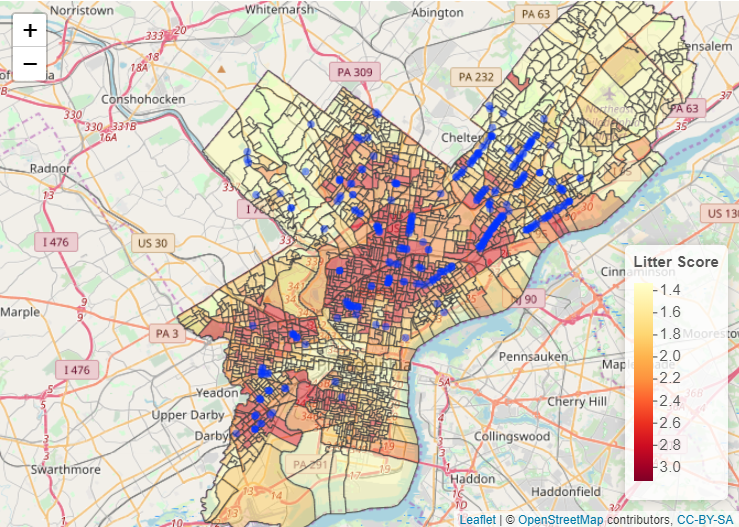
MUSA students Evan Cernea developed an independent study project using R and Keras to detect trash cans using Google StreetView imagery. You can access his code and check out the results here. Also, take a look at the interactive map.

